Recently Published Articles
Research Article | Open Access
Published on: 12 Jun 2026
Article ID: wjra.2026.f1202
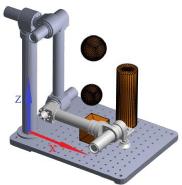
An Obstacle Avoidance Trajectory Planning Algorithm for Robotic Arm Based on Two-Stage Grid Method
This work presents an obstacle avoidance path search algorithm based on a two-stage grid method, which is illustrated with a five-degree-of-freedom (5-dof) robot arm, with the first three joints grouped for obstacle space detection and the remaining two joints for extending obstacle space. Under the working space of the robotic arm, the corresponding discrete point sets of obstacle avoidance paths are obtained based on arbitrary feasible start and end positions. The discrete points free of…


Research Article | Open Access
Published on: 27 Dec 2025
Article ID: wjra.2025.l2701
Reverse Engineering in DTs Using Object Detection
Object detection has become a fairly widespread method in recent years for computer processing that uses artificial intelligence to detect certain sought-after objects in digital images or videos. Object detection and recognition techniques have also experienced continuous development as their implementa-tion, use, and benefits have become extremely evident through the speed with which answers are found in the images submitted to attention. Thus, applications that use object recognition have…

Research Article | Open Access
Published on: 05 May 2025
Article ID: wjra.2025.e0501
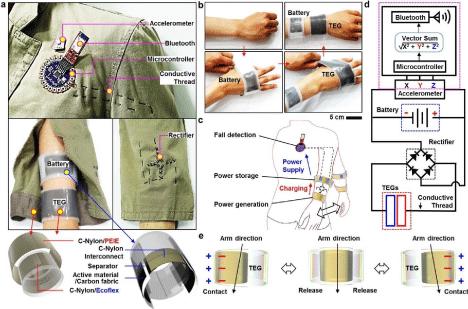
Implementation of Human Fall Activity Detection Systems
The elderly fall detection system has seen a rapid rise in medical devices due to the prediction of a 21.64% rise in the global population of elderly individuals over 65 by 2050. A significant challenge in researching elderly fall detection is the limited availability of data. The researcher cannot collect a large enough dataset on his own; access to care providers or medical institutions is extremely limited, and they typically reject ongoing research projects. However, such problems…

Research Article | Open Access
Published on: 05 Dec 2024
Article ID: wjra.2024.l0501
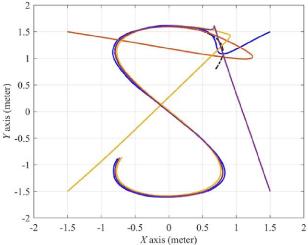
Optimal Control Design Results for Multiple Wheeled Mobile Robots
This research presents the optimal control design results for the nonlinear trajectory tracking of multiple wheeled mobile robots (WMRs). The purpose of this design is to propose an optimal control method for the nonlinear trajectory tracking problem of multiple WMRs. The key contribution of this research is a simplified control structure that enables effective trajectory tracking for multiple WMRs. Generally, solving the nonlinear trajectory tracking problem for multiple WMRs is highly…
